 化工儀器網
化工儀器網產品簡介
瑞士Sensefly EBee RTK 無人機
 |
深圳市鵬錦科技有限公司 |
|
—— 銷售熱線 ——
18319055480 |

瑞士Sensefly EBee RTK 無人機

瑞士Sensefly EBee RTK 無人機
瑞士Sensefly的二代EBEE無人機,更新到EBEE RTK 無人機,大大提高了對精度的要求。精度可達到3厘米,后處理鍵自動。EBee Rtk 航空測繪無人機,手拋起飛,規劃好路徑完成任務后,按照降落路徑,盤旋或直線下降。無需任何發射架和跑道,并且在整個飛行過程中自動操作。


怎么選擇款適合航空測繪無人機?
、要降低成本
二、要降低對控制人員的依賴程度
三、做到自動起降,把人的因素降到zui低
四、zui重要的是安性能
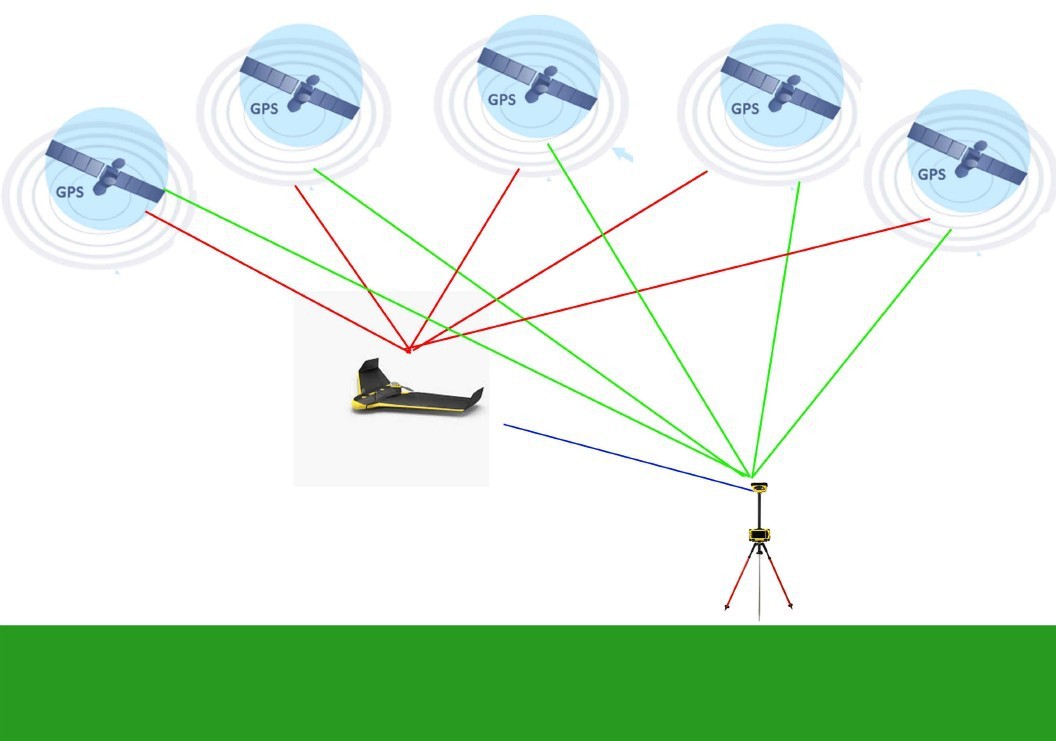
EBEE RTK測量的航空測繪無人機
測量的航空測繪
收集航拍圖片制作
正射鑲嵌圖和3D模型,
精度可達到3厘米 , 無接地
控制點。該eBee RTK設有個內置的
L1/L2 GNSS接收機。這使得它可以
從zui*品牌基站接收的修正數據 。
它的16萬像素攝像頭可以在拍攝圖像
時的分辨率達到1.5厘米/像素。這些圖像
可以轉換成正射鑲嵌圖和3D模型。
精度可達到3厘米/
5厘米 - 不需要地面GCP。
內部安設計
特別輕
僅重0.7千克(1.5磅)eBee RTK是個
市場上zui輕無人駕駛飛機。其靈活的
泡沫機身和后置式螺旋槳,
目的是確保無人機和地面上的人的安。
空氣動力學的外形
zui大飛行穩定性和耐力
它的空氣動力學配置文件允許eBee RTK單次飛行電池電量長達40分鐘,
達到36-57公里/每小時的巡航速度(10-16M/
S)。 RTK的eBee還可以抵抗高達
45公里/每小時(12米/秒)的風速
測量的航空測繪
收集航拍用以制作正射影像圖像和3 D模型,精度可低至3厘米- - -無地面控制點。該e B e e R T K設有個內置的L 1 / L 2 G N S S接收器。可用于接收來自大多數主要品牌基站的修正數據。它的1 6萬像素攝像頭可以在拍攝圖像時的分辨率達到1 . 5 c m / p i x e l。這些圖像可以轉換成正射鑲嵌圖和3 D模型。 精度可達到3 c m -5 c m - 不需要地面G C P。
傾斜影像
添加繪測項目或添加其他文檔這種正在申請的技術是基于專有的控制算法,就能讓R T K e B e e R T K以5 0°的傾斜角接近目標進行拍攝,且不需要相機平衡環。
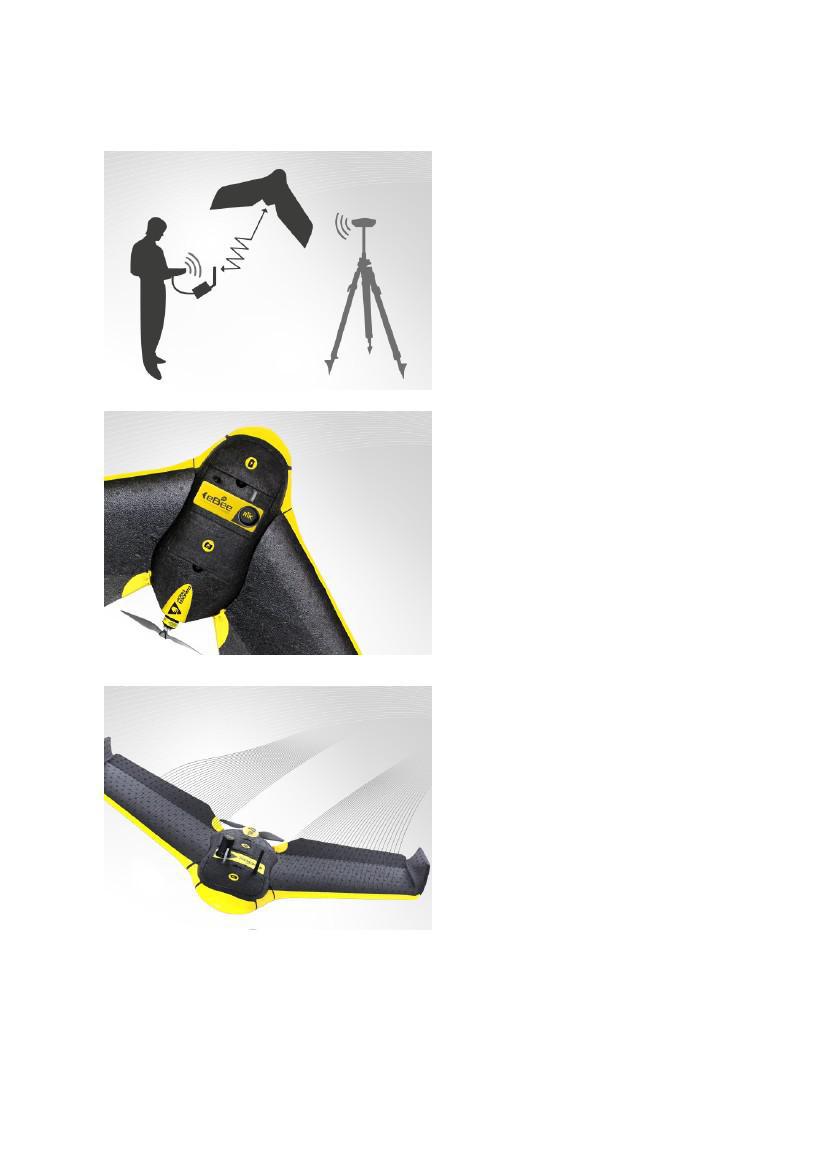
可拆卸機翼
可更換,包裝小e B e e R T K采用模塊化設計,機翼可拆,并與機身及附件放置在個小便攜式手提箱里。
隨身攜帶的小手提箱
便于運輸,所有配件都在箱子里該e B e e R T K的手提箱很小,你甚至可以把它當成手提隨身行李*。*根據航空運輸協會的指引
手動起飛
無需額外設備e B e e R T K重量輕,能夠用手發動。飛行前檢查完成后,只要搖三次,就可以發動引擎,準備起飛。非常簡單。
直觀計劃&控制
快速學會,方便使用s e n s e F l y具有直觀的地面控制軟E m o t i o n 2 ,可以讓你規劃,模擬,監測和控制e B e e R T K飛行前和飛行過程中的的軌跡。 本軟件是作為每臺e B e e R T K的標配軟件。
人工智能
無需飛行駕駛技巧E B e e R T K 自動完成飛行、圖像采集和著陸。人工智能包含在自動駕駛儀里,它不斷分析來自慣性測量裝置和機載G P S的數據來掌握飛行任務的所有情況。
回退程序
緊急情況注意事項如果e B e e R T K的傳感器檢測的緊急情況,
地面控制軟件e M o t i o n將顯示警告。 E b e eR T K會自動啟動相關的安程序,如檢測到電池電量低、強風的時,返回著陸點;如檢測到離地面太低的時候會向上攀升。
電動
綠色科技
由可充電鋰聚合物
電池驅動,e B e e R T K噪音小,
高度環保。
飛行數據記錄
直接連接e B e e R T K自動駕駛儀將所有飛行和圖像數據保存到機身。此數據可以通過U S B數據線
下載,并直接與e B e e R T K的p o s t f l i g h t e dT e r r a 3 D攝影測量軟件兼容。
專業繪測軟件*
每臺e b e e R T K 都會配有P o s t f i g h t T e r r a 3 D制圖軟件, 從而自動生成地理正射影像圖和數字高程模型(D E M)精度能達到3厘米(1 . 2英寸),而不需要地面控制點。
P o s t fli g h t T e r r a 3 D是個專業攝影測量軟件,能在臺式電腦或筆記本電腦上運行。
只需點幾下,就可以把空中圖像處理成厘米高精度的2 D地圖與3 D模型。
為了增強顯示結果,P o s t fli g h t T e r r a 3 D允許手動編輯和亮度控制。它還具有所有
P o s t fli g h t T e r r a L T 的功能。
此外,如果你想與傳統攝影測量軟件起處理無人機影像,它也是個*的工具,不過傳
統攝影測量軟件般無法處理小無人機的圖像。P o s t fli g h t T e r r a 3 D將為您提供相機校準
參數和匹配功能列表,可以提高傳統攝影測量軟件的處理速度。
* r a y C l o u d
r a y C l o u d是個新的概念,通過組合三維點云與原始輸入圖像來盡可能實現
zui高的精度。
*地理參考的2 D 正射影像和地圖圖塊
* 輸出 B I N G O / O R I M A / I N P H O
* 地理參考三維點云
* 地理參考三角模型
* 地理參考的3 D D E M / D S M
* 分辨率選項
* 本地處理
*快速處理
P o s t fli g h t T e r r a L T 和 P o s t fli g h t T e r r a 3 D - E B可在飛行后進行圖像快速處理。如
原始圖像的分辨率會給出個大約2 4 c m地面距離的正射影像圖。
* 接合線編輯